By Tracy Staedter, Discovery News
May 24, 2006
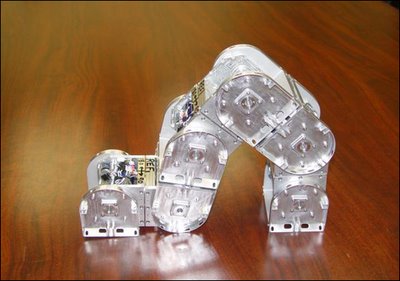
Researchers have designed a segmented robot that can slither like a snake, inch along like a caterpillar, curl into a wheel, and walk with leg-like appendages.
A locomotive jack-of-all-trades, the SuperBot is designed to cope with a variety of terrains and be versatile enough to function in unpredictable environments.
"Today you want to dig; tomorrow you want to transport things; the day after, you want to explore the craters in the dark area of the south pole of the moon," said associate professor Wei-Min Shen, director of Polymorphic Robotics Lab at the University of Southern California in Marina del Rey. "We built one robot to do many different tasks."
Shen's team presented the most recent incarnation of the robot this month at the International Conference on Robots and Automation in Orlando.
SuperBot's versatility stems from distinctive hardware and software.
The robot is made of aluminum alloy modules -- each made of a pair of cubes linked by three central joints. The joints give modules the flexibility to bend and twist in three different directions.
As a result, a single module can slither, inch and roll over almost as well as many modules linked together.
The software, itself inspired by the hormones that regulate biological systems, allows the modules to work together.
Hormones carry instructions from glands and tissues to cells, to control processes such as muscle growth, heart rate and hunger. The chemicals communicate with cells by way of receptor proteins, which interpret a hormone's message and influence the cell's activity accordingly.
In much the same manner, SuperBot's software facilitates the flow of messages across modules. A signal for the robot to move in a certain direction, for example, might bind with a given module only if that module has the right "receptor."
Each module has a full set of protocols for responding to messages. But the response depends on the module's location on the robot's body, or feedback from its environment.
"This is a bold attempt to make self-reconfigurable systems live up to their promise," said Hod Lipson, an expert in evolutionary robotics from Cornell University.
The idea is that hundreds, maybe even thousands, of SuperBot modules would be transported to a destination. Once there, they would separate and scatter to search a large area, and then later join together to accomplish bigger tasks.
Before SuperBot can make it to the moon, though, it must pass some rigorous experiments on Earth. This winter, Shen plans to test the robot at the Jet Propulsion Lab's Mars Yard in Pasadena, Calif. There, 20 modules will be linked together to perform different tasks -- including running, digging and climbing.
[from Discovery News]
No comments:
Post a Comment